 平台热线
平台热线



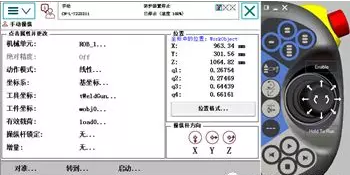
设置前,要先建立准确的tool数据(TCP),设置过程中使用正确的tool。设置步骤如下:
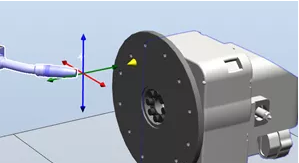
1)进入手动操纵界面,选择正确的工具坐标
2)进入校准,选择变位机,选择“基座”(base)
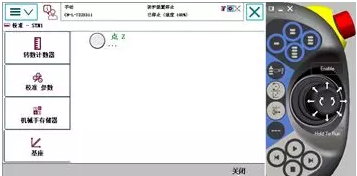
3)移动机器人工具至变位机旋转盘上一标记处,并点击“修改位置”记录位置。
4)旋转变位机一定角度(比如45°),再次移动机器人工具至变位机旋转盘上标记处,并点击“修改位置”记录第二个位置。
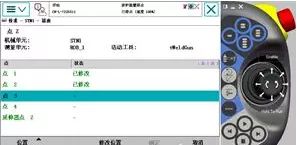
5)同理记录点3和点4。
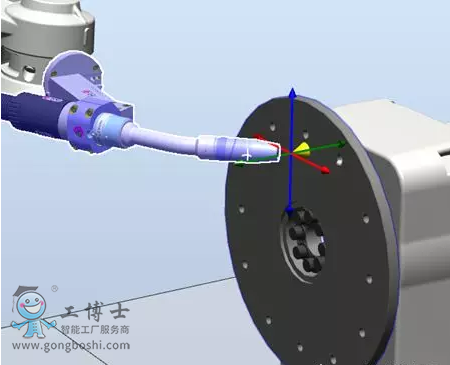
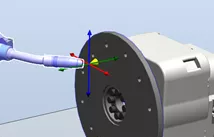
6)移动机器人离开变位机并记录为延伸器点Z(该操作仅设定变位机base的z的正方向)。完成所有记录点击“确定”,完成计算。
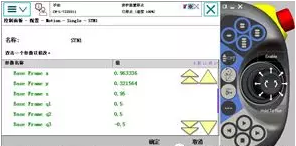
7)可以进入示教器-控制面板-配置-主题motion,single下看到变位机的base相对于world坐标系的关系。
8) 在手动操纵界面,选择工件坐标并新建一个工件坐标系,修改该坐标系的ufprog为false(及uframe不能人为修改值),ufmec修改为变位机的名字(即该坐标系被变位机驱动)。此后记录的点位坐标均在该坐标系下。可以轻易实现联动。